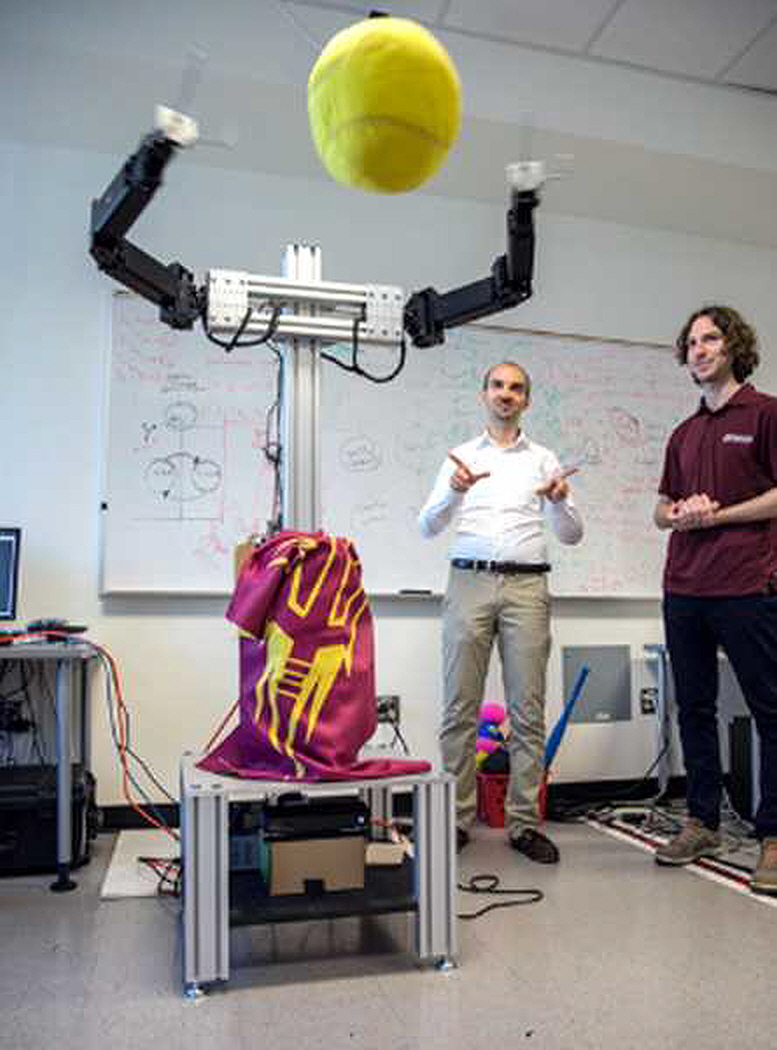
아리조나주립대학(ASU) 로봇 과학자들이 머신러닝 기술을 활용해 농구 슛을 하는 로봇을 개발했다.
그동안 개발된 탁구 로봇이나 컵에 공을 넣는 로봇들은 하나의 로봇 팔을 갖고 있으나, 이번에 개발된 로봇기술과 알고리즘은 두 개의 로봇팔을 이용해 농구공을 잡은 후 팔을 들어 골대에 넣는 작업을 수행한다.
두 개의 로봇 팔과 서로 다른 관절들이 협력해서 공을 골대에 넣어야하기 때문에 난이도가 높다.
아머 교수는 기존의 기술은 서로 다른 환경이나 변수에 로봇이 적응하도록 하기 위해 개별적인 움직임을 프로그램 하는데 반해 새로운 머신 러닝 기술은 2~3시간만에 스스로 바뀐 환경에 적응할 수 있다고 말했다.
가령 골대의 높이를 변경하거나 골대와의 거리를 조정하더라도 프로그래머가 물리학ㆍ수학ㆍ운동역학 등의 값을 변경하지 않고 로봇이 스스로 '슬램덩크' 등을 학습할 수 있다는 것.
기존에도 머신러닝을 이용해 주어진 작업을 수행하는 로봇들이 있었지만 정해진 작업을 학습하는데 2~3일의 시간이 걸렸다. 이번에 개발된 머신러닝 알고리즘을 활용하면 몇시간 안에 작업을 완수할 수 있다.
이번 프로젝트를 주도한 '헤니 벤 아머(Heni Ben Amor)' 교수는 기존의 머신 러닝의 단점을 보완해 새로운 알고리즘'sparse latent space policy search'를 개발했다.
이 알고리즘은 서로 다른 관절과 부품, 운동 사이의 협력을 이해할 수 있고 기술적으로는 강화학습의 형태를 취하고 있다.
농구공을 골안에 넣는 작업은 매우 역동적인 운동으로 이뤄져 있는데, 컴퓨터과학이나 머신러닝에 일반적으로 채택되는 'divide and conquer' 접근 방식이 아니라 적시에 역동적으로 힘을 가하는 방법을 채택했다고 한다.
 AZ 요양소의 특별한 프로그램 "새끼고양이 돌보며 스스로도 위안 ...
AZ 요양소의 특별한 프로그램 "새끼고양이 돌보며 스스로도 위안 ...
 한국에서 버려져 AZ 입양된 '치치' 새 의족달고 잘 적응
한국에서 버려져 AZ 입양된 '치치' 새 의족달고 잘 적응










