
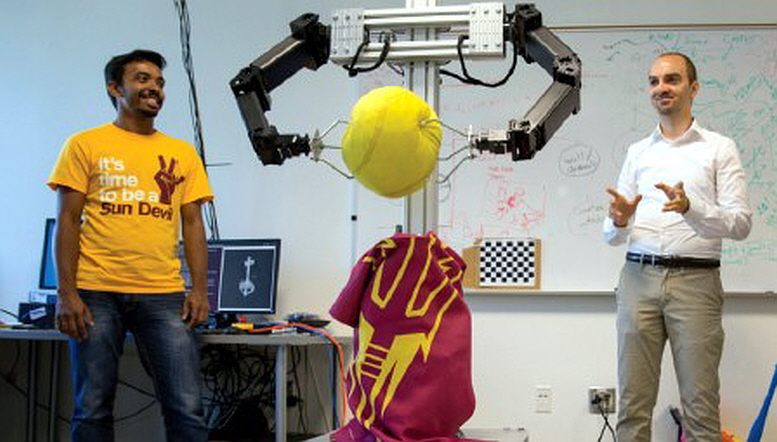
아리조나주립대(ASU) 헤니 벤 아머 교수팀은 머신러닝 기술을 활용해 농구공을 던지는 로봇을 개발했다.
로봇은 양손으로 농구공을 잡아 팔로 골대에 넣는 동작을 반복 학습한다.
양팔과 로봇 관절들이 잘 협력해야만 공을 넣을 수 있다.
골대의 높이를 바꾸거나 골대와의 거리를 조정해도 로봇은 새로운 환경에 맞게 스스로 학습할 수 있다.
이전에도 머신러닝 기술을 활용해 이같은 동작을 학습할 수 있었지만 아머 교수팀이 개발한 알고리즘은 2~3시간이면 바뀐 환경에 적응할 수 있다고 한다.
사실 로봇은 새로운 환경을 접하면 그동안 학습한 행동이 한순간에 무력화된다. 농구공을 넣는 강화 훈련을 오랫동안 받았더라도 골대의 높이가 30cm 정도만 높아지면 대부분 로봇들은 어쩔 줄 모른다.
지난해 11월말 라스베이거스에서는 자율주행 셔틀버스 나비야(Navya)가 야심찬 첫 운행을 시작했지만 교차로에서 만난 트럭과 접촉하는 사고가 났다.
정식 운행에 앞서 수많은 운행 경험을 갖고 있었던 나비야지만 접촉사고를 막지는 못했다.
문제는 나비야가 인간처럼 실수로부터 교훈을 얻지 못한다는 것.
인공지능 신경망은 방대한 양의 이미지 데이터 세트를 기반으로 학습한다. 하지만 한 번도 훈련받지 않은 환경을 만났을 때는 문제가 발생하고 이를 바탕으로 재훈련 과정을 진행하지 않으면 실수를 반복한다.
미 국방성 산하 방위고등연구계획국(DARPA)은 차세대 머신러닝 시스템인 평생학습기계(L2M)를 4개년 계획으로 개발 중이다.
L2M은 인공지능에 인간의 유연성을 결합하는 연구 사업으로 총 6500만 달러의 자금이 투입된다.
이 프로그램을 통해 DARPA는 새로운 일을 학습할 수 있으며, 언제 새로 학습해야 하는지, 무엇을 학습해야 하는지를 인공지능이 스스로 깨우치게 하겠다는 계획이다.
이를 위해 이 프로젝트를 함께 할 협력기관을 물색하고 있다.
차세대 머신러닝 기술이 개발되면 이전의 사고나 운전 중 사각지대 등에서 습득한 지식을 자율주행차에 적용할 수 있게 된다.
프로그래밍 되지 않거나 훈련받지 않은 상황에도 유연하게 적응할 수 있다.
이 프로그램의 디렉터인 하바 T 시겔만은 "우리는 인간의 유연성을 겸비한 엄격한 로봇을 원하지만 기존의 머신러닝은 불규칙하고 예측 불가능한 환경을 만나면 실패할 가능성이 크다"며 새로운 환경에서 실행 가능하도록 머신러닝의 능력을 확장하는 게 목표라고 밝혔다.












